
机械手是一种能够模拟人手运动的自动化装置,通常由控制系统、执行机构、传感器和终端执行器组成。它在工业生产和其他领域中发挥着重要作用,为生产线的自动化和精确操作提供了有效的解决方案。
虽然大多数工业机械手都需要编程来实现特定的动作和功能,但也存在一些不需要编程的机械手装置。这些装置主要基于机械结构设计和传统操作方法,不需要复杂的编程技术来控制。
1. 机械手操纵杆
机械手操纵杆是一种简单直观的装置,操作人员可以通过手柄进行机械手的控制和运动。通常通过杠杆原理和机械连接实现机械手的各个关节的运动。这种装置适用于一些简单的操作场景,如小规模装配和搬运。
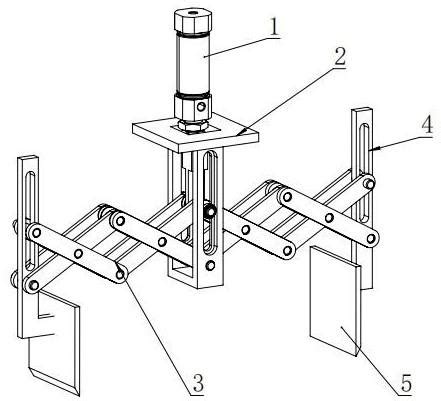
2. 气动机械手
气动机械手利用气压力传动气缸实现机械手的动作,通过控制气阀的开关来控制机械手的运动。这种装置无需电气控制系统和编程,适用于一些对精度要求不高的搬运和装配工作。
3. 机械手索引器
机械手索引器是一种能够按照固定轨迹进行运动的装置,通常基于机械齿轮和凸轮原理设计。操作人员可以通过手动操作或机械驱动来控制索引器的运动轨迹,无需复杂的编程技术。
优势:
- 不需要复杂的编程技术,易于操作和维护。
- 适用于一些简单的搬运和装配任务,成本较低。
- 部分装置可以根据需要进行定制设计,适用性广泛。
局限性:
- 功能和灵活性相对较弱,适用范围有限。
- 无法实现复杂的运动轨迹和精细的操作。
- 对操作人员的技能要求较高,易受人为因素影响。
不编程的机械手装置虽然在某些简单应用场景下具有一定优势,但在需要复杂功能和精细控制的情况下,仍然需要借助编程技术实现机械手的高效运作。因此,在选择合适的机械手装置时,需根据具体需求和应用场景综合考虑,以确保实现最佳效果。
版权声明
本文仅代表作者观点,不代表百度立场。
本文系作者授权百度百家发表,未经许可,不得转载。









祈翀
这家伙太懒。。。
- 暂无未发布任何投稿。


