
机器人离线编程夹取物料
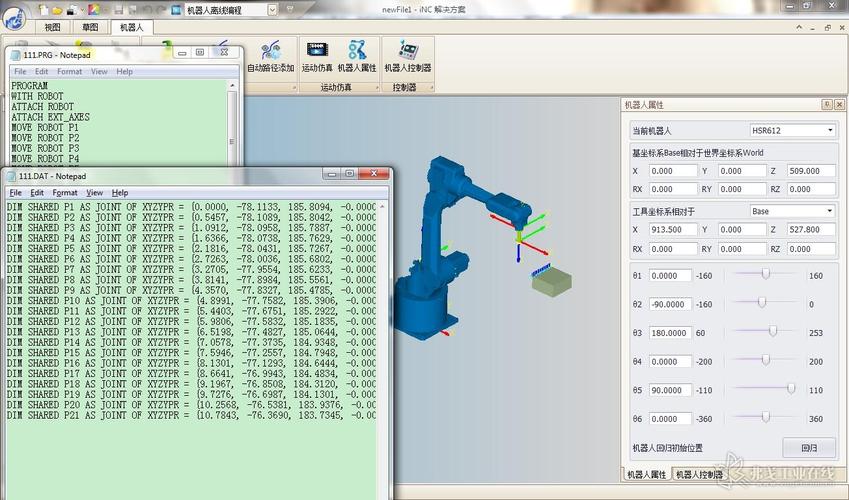
机器人离线编程是一种在没有实际机器人设备的情况下进行程序编写和仿真的方法。夹取物料是机器人应用中常见的任务之一,对于离线编程夹取物料,需要考虑到多个因素,包括工件形状、尺寸、重量、环境条件等。
在离线编程夹取物料之前,首先需要确定夹取策略。这涉及到选择合适的夹具、夹持方式以及夹取的位置和角度。考虑工件的形状和表面特性,选择合适的夹具类型,如气动夹爪、机械手指、磁性夹具等。
根据工件的位置和布局,确定机器人夹取的路径。这需要考虑到机器人的运动范围、夹具的可及性以及避免碰撞的路径规划。离线编程软件通常提供路径规划和碰撞检测功能,可以帮助优化夹取路径。
在离线编程过程中,进行碰撞检测是至关重要的。通过模拟机器人的运动轨迹,检测是否存在碰撞情况,并进行相应的优化调整。这包括调整夹取路径、夹具的姿态以及机器人的关节运动,以确保夹取过程中不会发生碰撞。
在完成夹取路径的优化之后,进行仿真验证是必不可少的步骤。通过离线编程软件进行仿真,模拟机器人的夹取动作,并检查夹取的准确性和稳定性。在仿真过程中,可以进行多次调整和优化,直到达到预期的夹取效果。
完成夹取路径的优化和仿真验证后,将编写好的程序导出,并上传至实际机器人的控制系统中。在上传过程中,需要确保程序的准确性和完整性,并进行必要的调试和测试,以确保机器人能够按照预期的路径夹取物料。
最后一步是在实际生产环境中进行操作和调整。根据实际情况对夹取程序进行调整和优化,可能需要考虑到工件的变化、环境的影响以及生产效率的提升。持续监控和优化夹取过程,可以帮助提高生产效率和夹取精度。
离线编程夹取物料是一个综合考虑多个因素的复杂过程,需要在夹取策略、路径规划、碰撞检测和仿真验证等方面进行深入分析和优化。通过合理的夹取策略和精确的编程,可以实现高效稳定的夹取操作,提高生产效率和产品质量。
版权声明
本文仅代表作者观点,不代表百度立场。
本文系作者授权百度百家发表,未经许可,不得转载。








岱祥
这家伙太懒。。。
- 暂无未发布任何投稿。


