
ABB编程地址解析与指导
在ABB机器人编程中,地址是指向数据的标识符,用于在程序中访问和操作各种类型的数据。这些地址包括控制器内存中的变量、输入/输出(I/O)信号、机器人轴位置等。下面将对ABB编程地址进行解析,并提供一些指导建议。
1.
变量地址:
在ABB机器人编程中,变量地址用于存储和操作各种类型的数据,如数字、字符串、数组等。变量地址的命名通常遵循特定的命名规范,以便程序员可以轻松理解其用途。例如:
```abb
VAR num1, num2 : REAL; ! 声明两个实数类型的变量
VAR str1 : STRING[10]; ! 声明一个长度为10的字符串变量
```
在程序中使用这些变量时,可以通过其地址来访问和修改其值:
```abb
num1 := 10; ! 将值10赋给变量num1
str1 := "Hello"; ! 将字符串"Hello"赋给变量str1
```
2.
I/O地址:
I/O地址用于与机器人周围的外部设备进行通信,如传感器、执行器等。这些地址通常用于监视输入信号(如开关状态)或控制输出信号(如执行器动作)。例如:
```abb
VAR digital_in1 : BOOL; ! 声明一个数字输入变量
VAR analog_out1 : REAL; ! 声明一个模拟输出变量
```
通过这些地址,可以读取输入信号的状态或控制输出信号的值:
```abb
digital_in1 := DI1; ! 读取数字输入DI1的状态
analog_out1 := 5.0; ! 控制模拟输出AO1的值为5.0
```
3.
轴地址:
轴地址用于控制机器人的各个轴,如旋转关节、直线关节等。通过轴地址,可以获取和修改机器人的位置、速度等参数。例如:
```abb
VAR joint1_pos : REAL; ! 声明一个关节位置变量
```
可以使用这些地址来获取机器人当前的位置或控制机器人运动到特定位置:
```abb
joint1_pos := GetPosJ(); ! 获取关节1的当前位置
MoveJ joint1_pos, v100, z10; ! 将机器人运动到关节1的位置,速度为100%(v100),姿态为z10
```
指导建议:
1.
命名规范:
确保在编程过程中使用清晰的命名规范,以便于他人理解和维护代码。2.
地址管理:
注意管理变量、I/O和轴地址,避免冲突和混乱,可以采用地址分配表等方式进行管理。3.
错误处理:
在程序设计中,考虑可能出现的错误情况,并添加适当的错误处理机制,以提高程序的健壮性和稳定性。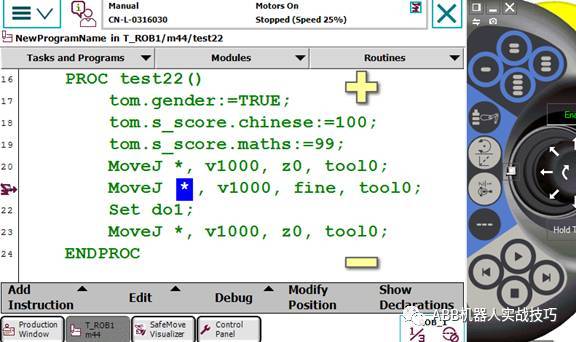
4.
文档和注释:
在程序中添加详细的注释和文档,说明每个地址的用途和作用,以便其他人理解和维护代码。5.
测试与调试:
在编写程序后,进行充分的测试和调试,确保程序能够正常运行并达到预期的效果。通过理解和正确使用ABB编程地址,您可以更高效地编写和管理ABB机器人程序,实现各种复杂的控制和自动化任务。
版权声明
本文仅代表作者观点,不代表百度立场。
本文系作者授权百度百家发表,未经许可,不得转载。








睿土
这家伙太懒。。。
- 暂无未发布任何投稿。


