
理解PID控制及其编程实现
PID(比例积分微分)控制是一种常见的反馈控制算法,广泛应用于工业控制、自动化系统、机器人技术等领域。它通过不断地调整控制输出,使得系统的实际输出达到期望值,从而实现精准的控制。在本文中,我们将深入探讨PID控制的基本原理,并介绍如何通过编程实现PID控制。
1. PID控制原理
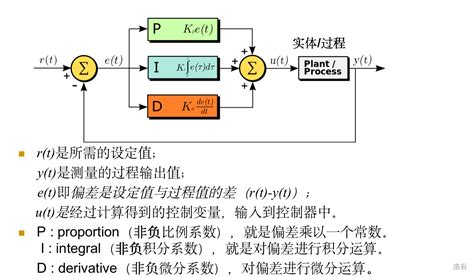
PID控制算法基于三个主要参数:比例(Proportional)、积分(Integral)、微分(Derivative)。这三个参数分别对应控制输出与偏差的当前、历史和未来变化进行调节。下面我们来详细解释每个参数的作用:
比例(P)项
:比例项与当前偏差成正比,控制输出与偏差之间的线性关系。增加比例增益会增加系统的灵敏度,但可能导致超调或震荡。
积分(I)项
:积分项与偏差的累积量成正比,用于消除稳态误差,确保系统能够快速并且准确地达到稳定状态。
微分(D)项
:微分项与偏差的变化率成正比,用于抑制系统的过冲和振荡,提高系统的稳定性和响应速度。PID控制器的输出由这三个项的加权和决定,其数学表达式为:
\[ u(t) = K_p e(t) K_i \int_{0}^{t} e(\tau) d\tau K_d \frac{de(t)}{dt} \]
其中,\( u(t) \) 是控制输出,\( e(t) \) 是偏差(期望值与实际值之差),\( K_p \)、\( K_i \) 和 \( K_d \) 分别是比例、积分和微分项的增益。
2. PID控制器的实现
现在让我们看看如何通过编程实现PID控制。下面是一个简单的伪代码示例:
```python
定义PID控制器类
class PIDController:
def __init__(self, Kp, Ki, Kd, setpoint):
self.Kp = Kp
self.Ki = Ki
self.Kd = Kd
self.setpoint = setpoint
self.prev_error = 0
self.integral = 0
def update(self, current_value, dt):
error = self.setpoint current_value
self.integral = error * dt
derivative = (error self.prev_error) / dt
output = self.Kp * error self.Ki * self.integral self.Kd * derivative
self.prev_error = error
return output
设置PID参数和目标值
Kp = 0.5
Ki = 0.1
Kd = 0.2
setpoint = 50
创建PID控制器对象
pid_controller = PIDController(Kp, Ki, Kd, setpoint)
模拟控制过程
current_value = 0
dt = 0.01 时间间隔
total_time = 10 总时间
for _ in range(int(total_time / dt)):
control_output = pid_controller.update(current_value, dt)
在这里将控制输出应用于实际系统
此处为示例,假设控制系统的输出即为当前值
current_value = control_output * dt
print("Current Value:", current_value)
```
在这段代码中,我们首先定义了一个`PIDController`类,其中包含了PID控制的各个参数以及更新方法。然后我们设置了PID参数和目标值,并创建了一个`pid_controller`对象。在模拟控制过程中,我们不断调用`update`方法来计算控制输出,并将其应用于实际系统,最后输出当前值。
3. PID控制的应用建议
在实际应用中,需要根据具体的控制对象和需求来选择合适的PID参数。通常情况下,可以通过试验和调试来优化PID参数,以达到最佳的控制效果。对于某些特殊情况,可能需要采用改进型的PID控制算法,如增量型PID、自适应PID等,以满足更复杂的控制需求。
另外,需要注意的是,PID控制器的性能受到采样周期和控制器响应速度的影响。较小的采样周期能够提高系统的响应速度,但也会增加计算负载;而较大的采样周期则可能导致系统不稳定或者控制性能下降。因此,在实际应用中需要根据系统的特点和性能要求来合理选择采样周期。
PID控制是一种简单而有效的控制算法,在许多工业和自动化应用中都有广泛的应用。通过深入理解PID控制的原理和实现方法,并结合实际需求进行调试优化,可以实现精准而稳定的系统控制。
结论
本文介绍了PID控制的基本原理及其编程实现方法,希望能够帮助读者更好地理解和应用PID控制算法。在实际应用中,需要根据具体情况选择合适的PID参数,并结合系统特点进行调试优化,以实现良
版权声明
本文仅代表作者观点,不代表百度立场。
本文系作者授权百度百家发表,未经许可,不得转载。









梓登
这家伙太懒。。。
- 暂无未发布任何投稿。


