
吕布的武器
-
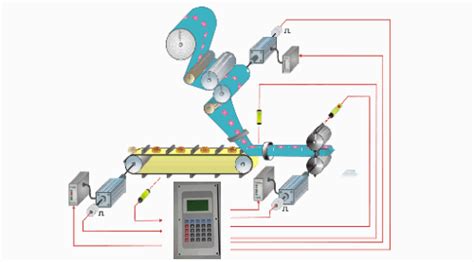
追剪程序例程
追剪与飞剪编程指南追剪(Chase and Follow)与飞剪(Path Following)是机器人运动控制领域中常见的两种算法,它们被广泛用于自动驾驶、无人机、机器人导航等领域。编程实现这些算法需要考虑机器人的运动模型、环境感知、路径规划等多方面因素。以下是针对追剪与飞剪的编程指南: 1. 理解追剪与飞剪算法 追剪算法:追剪算法旨在使机器人跟随特定目标物,如另一个移动的机器人、物体或位置。它通常包括两个主要步骤:感知目标位置并计算机器人到目标的最佳路径;执行运动控制以使机器人沿着路径移动并保持跟随目标。...